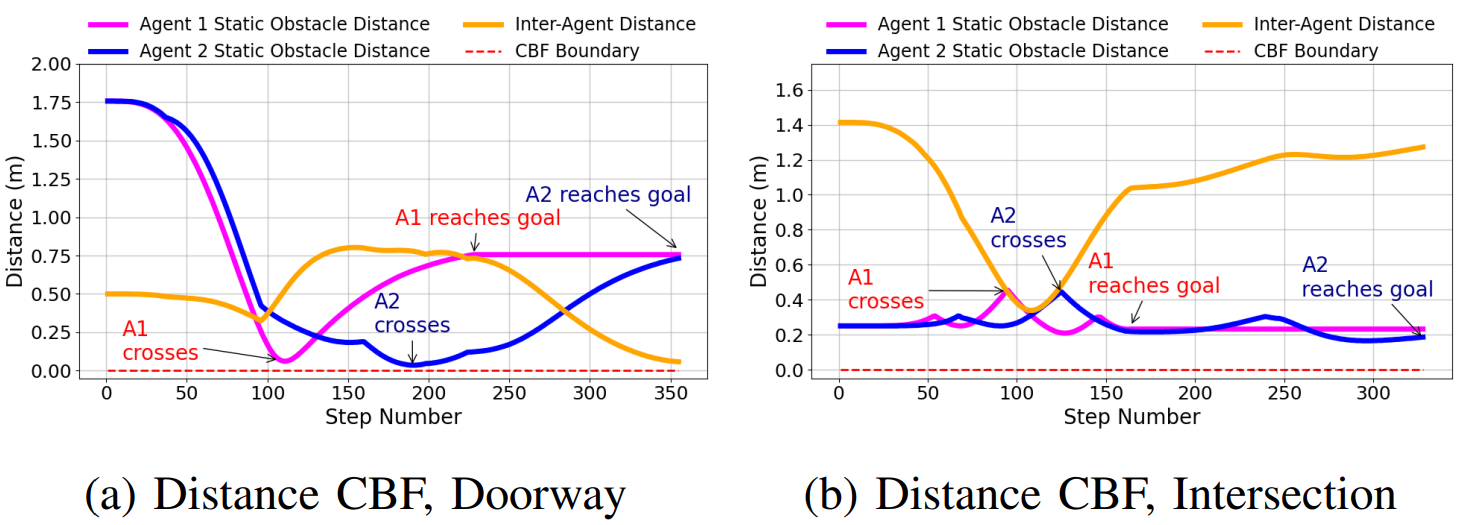
Distances between each agent and the closest static obstacle, as well as the inter-agent distance, plotted over time. The CBF boundary is included to indicate the safety threshold for maintaining safe navigation.
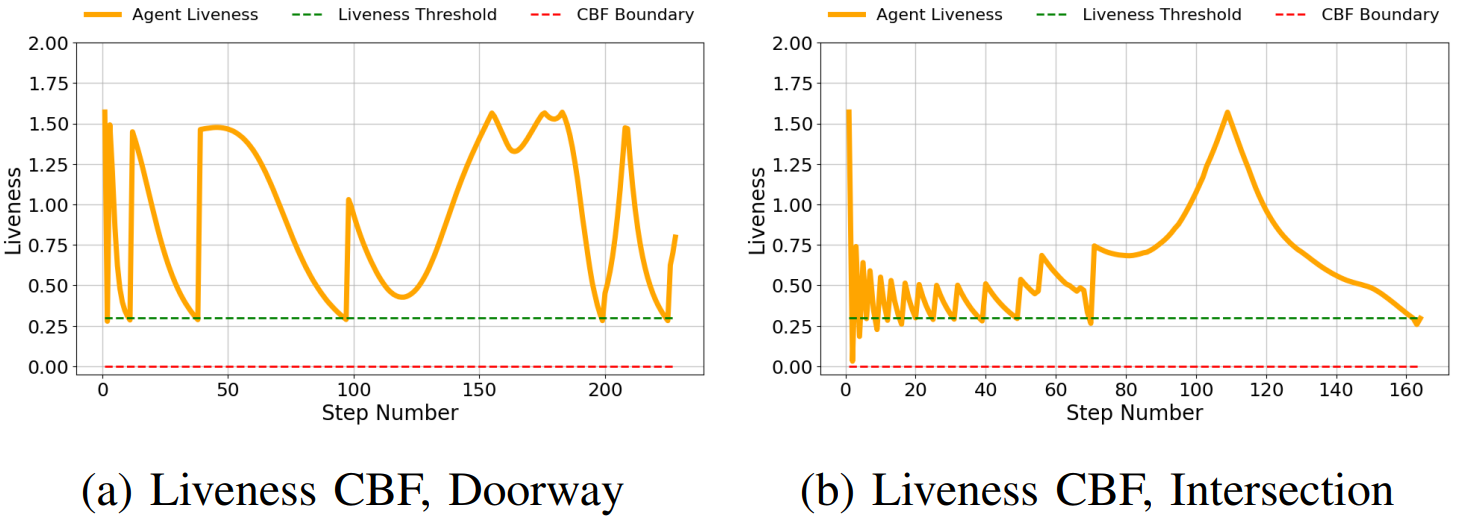
Liveness values computed at each time step, with liveness threshold and CBF boundary overlaid. Velocity perturbation is performed when liveness value falls below the liveness threshold.

Velocity profiles of both robots using LIVEPOINT frame- work, shown before and after navigating through a doorway and an intersection, highlighting the velocity adjustments made to ensure safe and deadlock-free passage.
BibTeX
@article{chen2025livepoint,
title={LiveNet: Robust, Minimally Invasive Multi-Robot Control for Safe and Live Navigation in Constrained Environments},
author={Chen, Jeffrey and Chandra, Rohan},
journal={arXiv preprint arXiv:2412.04659},
year={2025}
}